Ros2 life cycle
Jufeng Wu, 12 November 2019
ROS2 跟ROS1最大的不同,大概就是增加了life cycle這一個功能
雖然Ros1有一些人或是團隊,看到life cycle之後,也幫ros1加了這一個功能,但是一個是系統內建一個是後來加上,還是選系統內建比較實在?
じゃ、始めましょう!
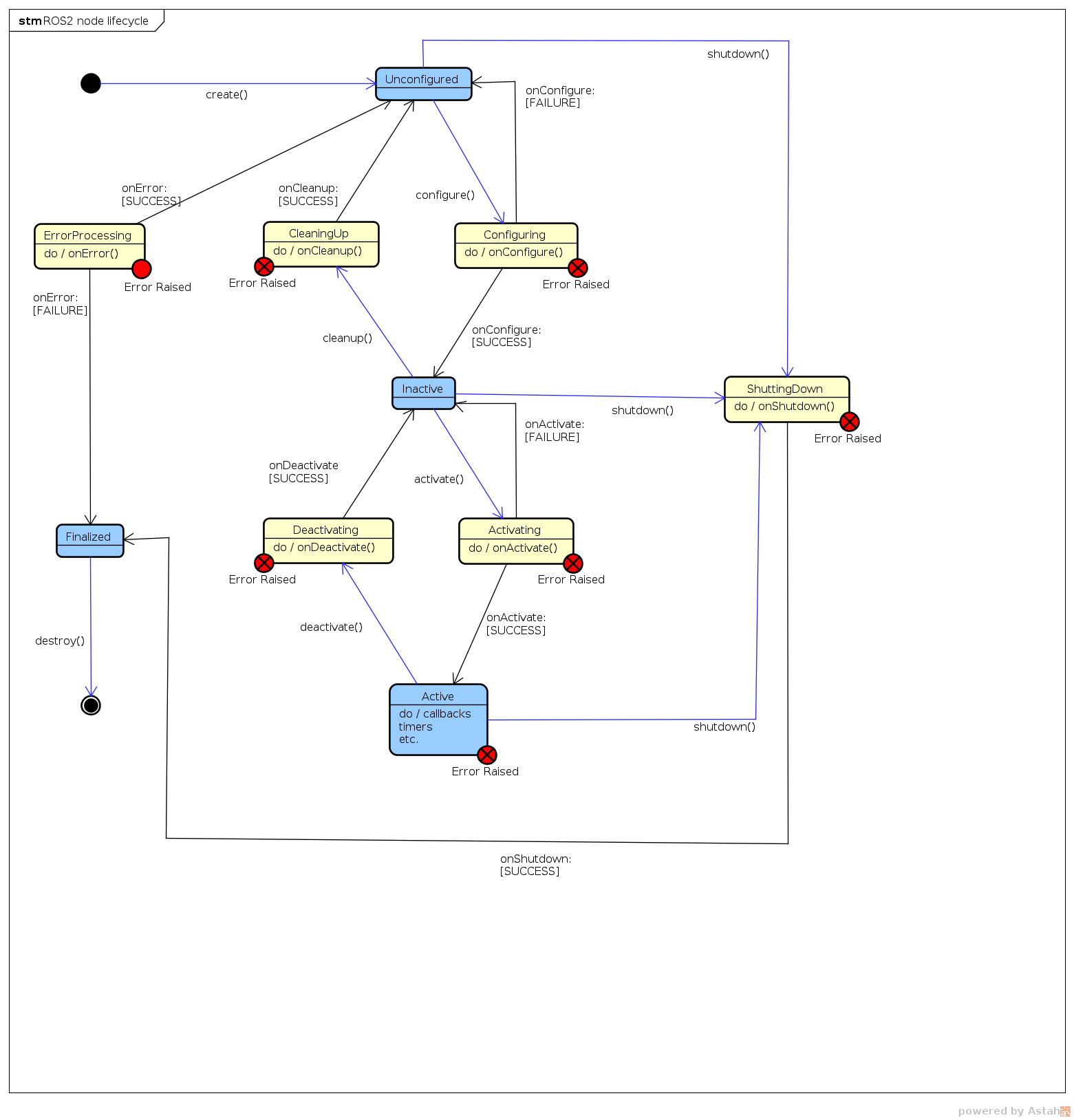
要使用life cycle首先要先看一下他的圖
基本上,這是一個state machine,有四個狀態
1.Unconfigured
2.Inactive
3.Active
4.Finalized
這四個狀態就是圖上藍色的的方塊
此外,在狀態和狀態之間有6個transition states,分別為
1.Configuring
2.CleaningUp
3.ShuttingDown
4.Activating
5.Deactivating
6.ErrorProcessing
<
這六個狀態就是我們可以複寫的狀態啦!
也就是當這六個transition states出現時,我們要作啥事
然而這裡要注意的是,ErrorProcessing是系統的unexception error 出現時的handle,所以我們不需要複寫這個
{kind=link}
此外,要注意的事情是,這幾個狀態必須要按照圖上的流程走,不能亂走
例如想要從Unconfigured直接跳過Inactive到Active是不行的,會報error!
但是不會進入ErrorProcessing
關於實做的部份,在我寫的範例中,可以看到有三個執行檔
第一個是很單純的聽
第二個是打訊號告訴聽的人
第三個是controler
第一個很簡單,就是一般的listen node
第三個controller也不難,基本上就是發送狀態給talker,讓他改變狀態
第二個稍微複雜一點,就是這六個transition states要做的相對應的動作
例如在Configuring的時候進行create_publisher;on_cleanup的時候重製counter之類的
然後只有在Active的狀態中,才會發送publish message出去
其他的狀態就算publish這一個function在作用,也不會發送message出去
life cycle大概就是這樣
其實之前在寫android的時候app也有屬於他的life cycle,所以看到life cycle這一個東西有一種熟悉感覺XD
此外,這一個東西在發展robot系統的時候好用,如果未來我要架設公司的系統的時候,大概也會用life cycle這一個概念吧
這樣每一個演算法或是功能開發者,主要的演算法放在activity,剩下只需要想好其他的狀態中需要做啥事情
例如進入到緊急停止的狀態把速度快速降到零
然後,每一個狀態狀態由主要的程式架構開發者或是由safety function來調控,這樣的話整個程式就會變得很好維護了!